
Graphics Group Videos


Informing Real-Time Corrections in Corrective Shared Autonomy Through Expert Demonstrations
Video demonstrations of the corrective shared autonomy techniques focusing on approaches to learn corrective behaviors from demonstration.


Recognizing Orientation Slip in Human Demonstrations
Video demonstrations of techniques to infer constraints and extra degrees of freedom for demonstrations where the demonstrator uses slip strategies.

Single-query Path Planning Using Sample-efficient Probability Informed Trees
This video is our virtual presentation appearing at ICRA 2021 on our path planning algorithm SPRINT (Sample-efficient PRobability INformed Trees). The paper was published as an ICRA/ RA-L paper in 2021.


Boxer: Interactive Comparison of Classifiers (Talk Video)
Virtual talk for EuroVis 2020 about the Boxer system for comparing machine learning classifiers.

Boxer: Interactive Comparison of Classifiers (Paper Video)
Demonstration of the Boxer System from the 2020 EuroVis Paper

Remote Telemanipulation with Adapting Viewpoints in Visually Complex Environments
Video for our RSS 2019 paper on interactive manipulation using real time control, and a second robot that automatically guides the camera.

Shared-Control-Based Bimanual Robot Manipulation
Video accompaniment to our 2019 paper on interactive control of bimanual robots.
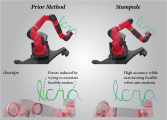
Stampede: A Discrete-Optimization Method for Solving Pathwise-Inverse Kinematics
Video accompaniment to our ICRA 2019 paper on Pathwise Inverse Kinematics.