Make the Unhearable Visible: Exploring Visualization for Musical Instrument PracticeJanuary, 2026 (Last Modified: July, 2026)VideoBy: Frank Heyen, Michael Gleicher and Michael SedlmairVideo Accompaniment for TVCG PaperYouTube Paper Page Project Page mp4 file Read formatted page...
3D Reconstruction Using Only 15 PixelsNovember, 2025 (Last Modified: March, 2026)VideoBy: Carter Sifferman, Yiquan Li, Yiming Li, Fangzhou Mu, Michael Gleicher, Mohit Gupta, Yin LiVideo accompanyment for ICCV '25YouTube Paper Page Project Page Read formatted page...
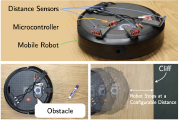
Using a Distance Sensor to Detect Deviations in a Planar SurfaceAugust, 2024 (Last Modified: September, 2024)VideoBy: Carter Sifferman, William Sun, Mohit Gupta and Michael GleicherVideo accompanyment for the RA-L / ICRA '24 paperYouTube Paper Page Project Page mp4 file Read formatted page...
Towards 3D Vision with Low-Cost Single Photon CamerasJune, 2024 (Last Modified: October, 2024)VideoBy: Fangzhou Mu, Carter Sifferman, Sacha Jungerman, Yiquan Li, Mark Han, Michael Gleicher, Mohit Gupta, Yin LiVideo accompanyment for the CVPR '24 paperYouTube Paper Page Project Page mp4 file Read formatted page...
IKLink: End-Effector Trajectory Tracking with Minimal ReconfigurationsMay, 2024 (Last Modified: September, 2024)VideoBy: Yeping Wang, Carter Sifferman and Michael GleicherVideo accompanyment for the ICRA '24 paperYouTube Paper Page mp4 file Read formatted page...
Enhancing Text Corpus Exploration with Post Hoc Explanations and Comparative DesignDecember, 2023 (Last Modified: November, 2024)VideoBy: Michael Gleicher, Yunyu Bai, and Keaton LeppananVideo accompanyment for the AbstractsViewer paperYouTube Paper Page Project Page mp4 file Read formatted page...
Exploiting Task Tolerances in Mimicry-based TelemanipulationOctober, 2023 (Last Modified: September, 2024)VideoBy: Yeping Wang, Carter Sifferman and Michael GleicherVideo presentation for our IROS’23 paperYouTube Paper Page mp4 file Read formatted page...
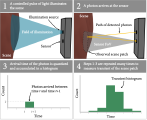
Unlocking the Performance of Proximity Sensors by Utilizing Transient HistogramsSeptember, 2023 (Last Modified: September, 2024)VideoBy: Carter Sifferman, Yeping Wang, Mohit Gupta, Michael GleicherVideo accompanyment for the RA-L / IROS '23YouTube Paper Page Project Page mp4 file Read formatted page...
RangedIK: An Optimization-based Robot Motion Generation Method for Ranged-Goal TasksMay, 2023 (Last Modified: June, 2023)VideoBy: Yeping Wang, Pragathi Praveena, Daniel Rakita and Michael GleicherVideo accompanyment for the ICRA '23 paperYouTube Paper Page mp4 file Read formatted page...
Geometric Calibration of Single-Pixel Distance SensorsMay, 2022 (Last Modified: September, 2024)VideoBy: Carter Sifferman, Dev Mehrotra, Mohit Gupta, Michael GleicherVideo accompanyment for the RAL / IROS paperYouTube Paper Page Project Page mp4 file Read formatted page...
Trinary Tools for Continuously Valued Classifiers (CBoxer Talk Video)March, 2022 (Last Modified: June, 2022)VideoBy: Michael Gleicher, Xinyi Yu, Yuheng ChenTalk Video for CBoxer (VisXAI presentation Trinary tools for continuously valued binary classifiers)YouTube Paper Page Project Page mp4 file Read formatted page...
Trinary Tools for Continuously Valued Classifiers (Paper Accompaniment Video)March, 2022 (Last Modified: June, 2022)VideoBy: Michael Gleicher, Xinyi Yu, Yuheng ChenPaper video for CBoxerYouTube Paper Page Project Page mp4 file Read formatted page...