
Awareness of (and with) Robots
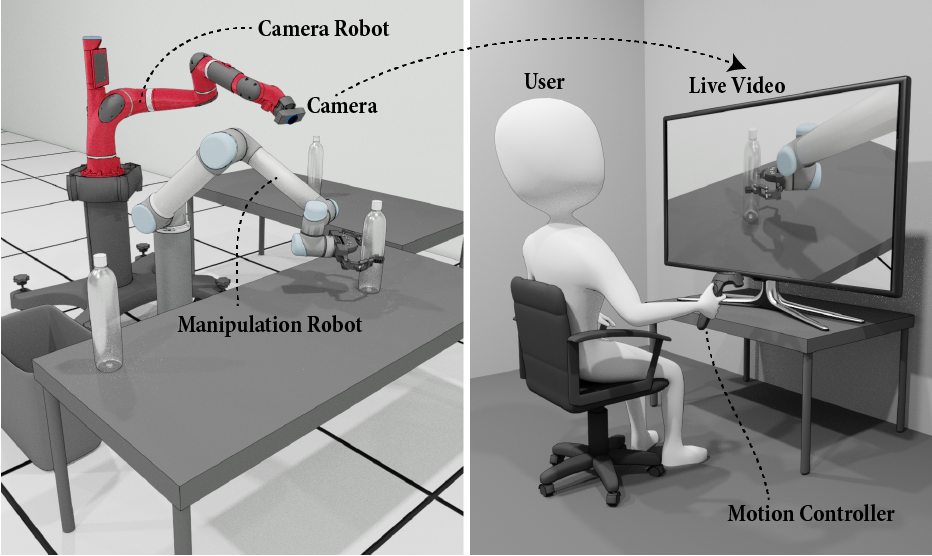
We are interested in how we can help human stakeholders (operators, observers, etc.) have appropriate understanding of robots and their situations. This requires us to design methods (such as visualizations) that help communicate robot state, environment, plans, and history to users. One aspect that we explore is using robots to provide viewpoints (move cameras) to help observe robots (or other aspects of the environments).